
Motivation
Es gibt i.w. zwei grundsätzlich unterschiedliche Vorgehensweisen, wie ein Roboter durch Ihre Räumlichkeiten navigiert. Zufällig oder nicht, d.h. zufällig oder systematisch.
Jedoch haben beide Arten ihre Vor- und Nachteile.
Es ist nicht so einfach oder eindeutig, wie es manche darstellen möchten. Das eine ist nicht grundsätzlich schlechter als das andere, nur anders.
Unabhängig davon, ob es nun teurer oder günstiger ist, was durch die zunehmende Konkurrenz aus Fernost eh relativiert wurde und wird.
In diesem Beitrag zeige ich Ihnen, wie zufällige und systematische Navigation funktionieren, was es sonst noch gibt, und natürlich, welche Vorteile und auch welche Nachteile ich jeweils sehe, so dass Sie eine Entscheidung treffen können, was Ihnen wichtig ist und was genau Sie brauchen.
Wie funktioniert die zufällige Navigation?
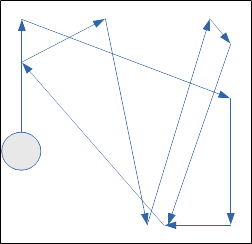
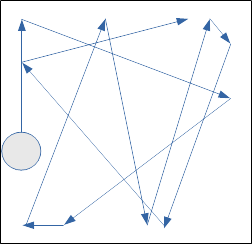 Bei der zufälligen Navigation bewegt sich der Roboter chaotisch und ohne konkreten Plan.
Bei der zufälligen Navigation bewegt sich der Roboter chaotisch und ohne konkreten Plan.
Dabei fährt der Roboter geradeaus, bis ihn seine Sensoren auf ein Hindernis aufmerksam machen. Dies kann zum Beispiel der Abgrundsensor sein, der feststellt, dass unter ihm kein Boden mehr ist.
Der Stoßfänger könnte melden, dass er einen Gegenstand oder eine Wand erfühlt.
Oder es kann der Annäherungssensor sein, der mit Infrarot oder Ultraschall einen Gegenstand wahrnimmt. Auch eine Virtuelle Wand wird so als Barriere erkannt, die nicht durchfahren werden darf.
In jedem Fall bewegt sich der Roboter dann nicht weiter in Fahrtrichtung, sondern stoppt, dreht nach links oder rechts ab und fährt erst dann weiter.
Dies führt dazu, dass der Reinigungsroboter im Schnitt alle Flächen aus unterschiedlichen Richtungen und meist mehrfach überfährt.
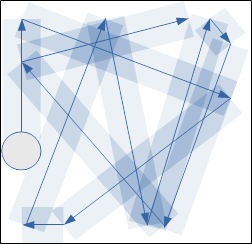 Je länger der Roboter reinigt, desto wahrscheinlicher ist es, dass die Bodenflächen komplett abgedeckt werden.
Je länger der Roboter reinigt, desto wahrscheinlicher ist es, dass die Bodenflächen komplett abgedeckt werden.
Es kann jedoch auch sein, dass einzelne Bereiche ausgelassen werden, weil sie zufällig nicht erreicht werden.
Dies ist nicht weiter schlimm, da die zufällige Navigation auf Zeit und Wiederholung setzt.
D.h. was jetzt nicht überfahren wird, wird es in Kürze, zum Beispiel bei der nächsten Durchquerung des Raumes – gleich oder morgen.
Wie funktioniert die systematische Navigation?
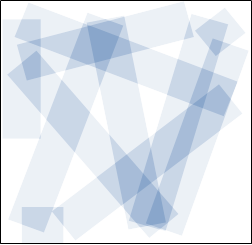
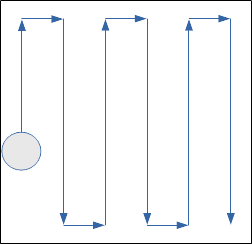 Ganz anders arbeitet die systematische Navigation. Hierbei erkennt der Roboter seine Umgebung, meist mit einem Laser oder einer Kamera.
Ganz anders arbeitet die systematische Navigation. Hierbei erkennt der Roboter seine Umgebung, meist mit einem Laser oder einer Kamera.
Mitunter kommt auch hier Infrarot zum Einsatz, wo separate Infrarotsender sozusagen eine Referenz erzeugen, die angepeilt wird.
In jedem Fall erkennt der Roboter seine Position im Raum und kann so sehr präzise navigieren.
Mit Laser oder Kamera wird zudem der Grundriss und die Position und Form von Gegenständen erkannt. Diese werden eng umfahren.
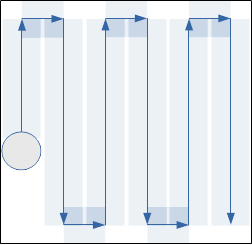
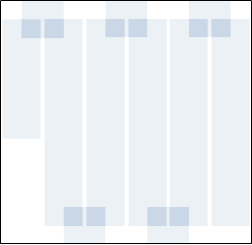
Die zu reinigende Fläche wird dann in Bereiche unterteilt, die der Roboter der Reihe nach abarbeitet. Dabei wählt der Robotersauger sie (leicht überdeckend) so, dass seine Bürste oder Saugbürste die gesamte Fläche reinigt.
Hierbei ergeben sich zwei Besonderheiten, die eine zufällige Navigation nicht erlaubt.
Der Roboter weiß genau, wo er sich im Raum befindet, welche Teile er bereits gereinigt hat und was noch zu tun ist. Wird der Akku schwach, kann der Roboter seine Arbeit unterbrechen, direkt zu seiner Ladestation zurückkehren, um ihn wieder zu füllen und dann genau dort weitermachen, wo er unterbrochen hatte.
 Dies ermöglicht dem Roboter insbesondere, beliebig große und beliebig komplizierte Grundrisse effizient zu reinigen.
Dies ermöglicht dem Roboter insbesondere, beliebig große und beliebig komplizierte Grundrisse effizient zu reinigen.
Dabei werden ohne weitere Hilfsmittel Übergänge von einem Raum zum anderen erkannt und genutzt, wenn der aktuelle Raum gereinigt ist.
Der Roboter erkennt zudem, wann die Arbeit erledigt ist und alles gereinigt wurde.
Konkreter heißt dies: er erkennt, wenn er überall war und alle Flächen überfahren hat. Er fährt also nicht länger, als notwendig, sondern kehrt direkt zu seiner Ladestation zurück.
Systematisch navigierende Reinigungsroboter sind also stets schneller fertig, und fahren nicht mehrfach über die gleiche Fläche.
Manche Modelle, wie der Xiaomi Mi oder Xiaomi Roborock bieten die Möglichkeit, Bereiche oder die gesamte Fläche mehrfach abzufahren. Dies kann Vorteile bieten, da beim zweiten Durchgang Verunreinigungen aufgenommen werden könnten, die beim ersten Mal nicht ganz erfasst wurden.
Wie funktioniert die gemischte Navigation?
 Die gemischte Navigation ist stets eine zufällige Navigation, die um einzelne, systematische Aspekte ergänzt wurde, die Sie entweder manuell nutzen können oder vom Roboter automatisch gewählt werden.
Die gemischte Navigation ist stets eine zufällige Navigation, die um einzelne, systematische Aspekte ergänzt wurde, die Sie entweder manuell nutzen können oder vom Roboter automatisch gewählt werden.
Besonders beliebt ist dabei ein Kantenmodus, mit dem der Roboter gezielt einer Kante (etwa einer Wand) folgt. Der Vorteil ist hierbei, dass so dieser kritische Bereich nah an der Wand entlang besser gereinigt wird, als wenn der Roboter nur hier und da zufällig auf die Wand trifft, und direkt wieder abdreht.
iRobot Roomba Saugroboter erkennen Kanten meist automatisch und können so Wänden oder auch Teppichen/Hartböden-Übergängen selbst folgen, was zur Qualität der Reinigung beiträgt. Bei anderen Modellen, wie etwa dem Ecovacs Robotics Deebot Slim 2, können Sie den Roboter explizit mit dem Folgen der Kante beauftragen.
Ein anderes Beispiel, wo zufällige Navigation ergänzt wurde, liefert wiederum iRobot mit dem Dirt Detect. Diese beim Roomba realisierte Funktion erkennt stärkere Verunreinigungen und lässt den Roboter in einer Vor- und Rückwärtsbewegung die Stelle wiederholt überfahren, um die Reinigungsleistung zu verbessern.
Fazit
Es gibt i.w. zwei grundsätzlich unterschiedliche Vorgehensweisen, wie ein Roboter durch Ihre Räumlichkeiten navigiert. Zufällig oder nicht, d.h. zufällig oder systematisch.
Beide haben Vor- und Nachteile.
Zufällige Navigation
Zufällige Navigation ist relativ einfach, und sieht zufällig und ungeplant aus, weil sie genau das ist.
Es ist kein Fehler und nicht schlecht, denn das Reinigungsergebnis kann gut sein, was zum Beispiel iRobot mit seinen Roomba Modellen beweist. Diese sehr erfolgreichen Reinigungsroboter navigieren bis einschließlich der 800er-Reihe zufällig, wobei jedoch zunehmend ergänzende Funktionen hinzukamen. Erst die 900er navigieren systematisch.
Chuwi iLife und die ältere Ecovacs Robotics Deebot Saugroboter sind weitere Beispiele für zufällige Navigation mit guten Reinigungsleistungen.
Zufällige Navigation ist nicht geeignet, beobachtet zu werden und es eignet sich nicht, wenn bei jedem einzelnen Reinigungsdurchgang restlos alles abgefahren und gereinigt werden muss.
Ich bin ja der Meinung, dass ein Reinigungsroboter dann für Ordnung sorgen soll, wenn man selbst nicht vor Ort ist. In dem Fall sehen Sie nur das Ergebnis und nicht, wie es erzeugt wurde. Doch wenn Sie einem zufällig navigierenden Roboter zusehen, besteht die Gefahr, dass Ihnen eher eine ausgelassene Stelle auffällt, als das gute Gesamtergebnis.
Denken Sie hier daran, dass zufällige Navigation genau so funktioniert, im Schnitt alles gereinigt wird, und machen Ihre Bewertung am Reinigungsergebnis fest.
Ein interessanter Vorteil ist jedoch die Verfügbarkeit von einem Kantenmodus, idealerweise automatisch aktiviert, da so die Reinigung an Wände heran und in Ecken hinein deutlich besser ist.
Systematische Navigation
Systematische Navigation mit (Infrarot-)Referenzpunkten erlaubt dem Roboter seine Position zu bestimmen und den Raum systematisch, meist Bahn für Bahn abzufahren.
Dies wird beispielsweise bei den iRobot Braava Wischrobotern realisiert, deren Navigationswürfel („NorthStar“) genau diese Referenz (meist eine pro Raum) erzeugt.
Systematische Navigation mit Laser oder Kamera erlaubt es, nicht nur die eigene Position zu erkennen, sondern auch den Grundriss und die Lage und Form von Hindernissen. Dies ermöglicht eine gezielte Planung und effiziente Durchführung der Reinigung auch komplizierter Grundrisse, inklusive der automatischen Nutzung von Übergängen zu anderen Räumen ohne weitere Hilfsmittel.
Die längste Erfahrung mit systematischer Navigation hat Neato Robotics, deren Saugroboter durchgängig systematisch navigieren.
Gerade die Neato Robotics BotVac-Reihe (BotVac, BotVac D, BotVac Connected) werden für Ihre Reinigungsleistung gelobt, und zeichnen sich zudem nicht nur durch ihre Form (gerade Front und runder Rücken: „D“) aus, sondern kommen auch besonders nah an Wände heran, da der Abstand von Saugmodul zum Rand des Gehäuses besonders gering ist.
Roboter mit systematischer Navigation erlauben es mitunter (meist in einer App) Räume zu benennen und gezielt anzusteuern, oder zu einem konkreten Punkt im Grundriss geschickt zu werden („Go-To“-Funktion), während zufällig navigierende wie ein ferngesteuertes Auto gefahren werden müssen.
Fahrten sind zudem direkt und effizient, so dass in gleicher Zeit mehr Fläche geschafft wird.
Die Lagekenntnis und Planung erlaubt es dem Roboter, die Reinigung zu unterbrechen und genau dort fortzusetzen, wenn zum Beispiel der Akku aufgeladen wurde.
Das systematische Vorgehen sieht geordneter aus, weil es das auch ist, und ist damit eher geeignet, beobachtet zu werden.
Die hohe Effizienz und Geschwindigkeit folgt auch daraus, dass der Roboter über bearbeitete Flächen Buch führt und unnütze Wiederholung vermeidet.
Da schwerere (oder ungünstigere) Verunreinigungen aber mitunter nicht vollständig mit einem Durchgang beseitigt werden können, bieten Xiaomi Saugroboter die Möglichkeit, Flächen mehrfach abzufahren – sofern Sie dies wünschen.
Xiaomi nutzt hier geschickt seine insgesamt hohe Geschwindigkeit und längere Ausdauer (der gut doppelt so starke Akku führt direkt zu einem geringeren Bedarf an Unterbrechung zum Aufladen).
Denn obwohl der Xiaomi trotz des günstigen Preises auch mit dem derzeit stärksten Saugmotor ausgestattet ist, kann der zweite Durchgang für ihn ein Vorteil sein.
Eine Seitenbürste, wie sie viele Roboter nutzen, um die Reinigung an Wände und Gegenstände heran und in Ecken hinein zu verbessern, kann auch stets dazu führen, dass zum Beispiel Krümel dahin bewegt („geschossen“) werden, wo der Roboter schon war und durch Überlappung jetzt nicht mehr kommt.
Bei systematischer Navigation bleiben diese bis zum nächsten Reinigungsdurchgang, meist am nächsten Tag, liegen, da wiederholtes Überfahren bearbeiteter Bereiche vermieden wird.
Der direkte zweite Durchgang des Xiaomi ist hier der nächste Reinigungsdurchgang, der aber sofort durchgeführt wird.
Allerdings haben sowohl der Xiaomi Mi als auch der Xiaomi Roborock S50 hier eine zusätzliche, derzeit einmalige Funktion: die Seitenbürste bewegt sich unterschiedlich schnell.
Während sie in der Nähe von Wänden mit 330 Umdrehungen pro Minute rotiert, verringert sie die Geschwindigkeit sonst auf 130 Umdrehungen pro Minute, womit der Effekt weiter verringert wird.
Am besten schauen Sie, ob bei Reinigung mit einem Durchgang überhaupt etwas liegen gelassen wird, bevor Sie den zweiten nutzen.